-
Products
- Visual Inspection Equipment
-
- Laptop Appearance Inspection Device

- Online PCB Visual Inspection Machine

- Mini-LED Glue Defect Inspection Equipment
- Tablet Component Defect Inspection Equipment

- Backlight Panel Size and Contour Detection

- Phone Board 2D Defect AOI

- Mobile Phone Camera Color Deviation Full-Size Inspection Machine
- Mobile Phone Camera Functional Size Inspection Line

- Watch Back Cover Size Detection Equipment

- Monocrystalline Wafer Cutting Blade Defect Detection

- Automatic Defect Detection for Watch Microphones

- Automatic Color Detection for Mobile Phone Buttons

- Battery Composite Film Defect Detection

- Medical Stapler Magazine Inspection

- Medical Saline Bottle Inspection

- Universal Joint Cross Shaft Appearance Defect Detection

- High-Precision Alignment and Lamination of Automotive Windshields and PVD Films
- H1H2 Dedicated Lithium Battery Inspection Equipment
- LCD Screen Measurement

- FPC Flexible Circuit Board Defect Detection
- Universal Platform for Tablet Computer Appearance Defect Detection

- Laptop Appearance Inspection Device
- Vision Measurement Equipment
- Functional Inspection Equipment
-
- Watch Back Cover Glass Translucency Testing Integrated Machine

- Watch Back Cover Glass Illumination Testing Equipment

- Mobile Phone Camera Module Airtightness Testing Integrated Machine

- Watch Back Cover Optical Properties Testing Equipment

- Integrated Machine for Airtightness Testing of Mobile Phone Camera Modules

- Force and Stroke Testing Equipment

- Watch Back Cover Glass Translucency Testing Integrated Machine
- Smart Assembly Equipment
- Intelligent inspection equipment
- Software





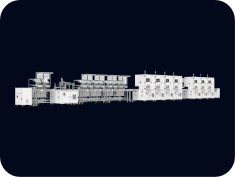




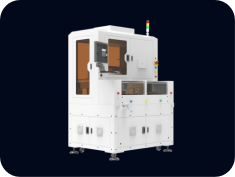
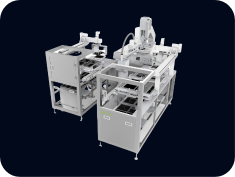
Laptop Appearance Inspection Device
A surface defect non-destructive inspection software has been developed for the manual inspection of notebook surface quality in the electronics industry. Initially, the surface of the notebook shell is roughly positioned by the fixture mechanism. Through the feedback of motor A and B phase encoding, hard triggering of an 8K line scan camera and a high-frequency light source controller are used to achieve time-division strobing. The complete image obtained is divided into multiple equal-sized pictures according to the customer's indicated point position map. Using the JSON HTTP protocol, the algorithm server is requested to obtain the inference result of a single image. Finally, the product surface defect types are obtained through sample-level result queries.
 The accuracy rate is high, with a miss and overkill rate of less than 5%.
The accuracy rate is high, with a miss and overkill rate of less than 5%. Intelligent detection of various types of appearance defects.
Intelligent detection of various types of appearance defects. Strong compatibility:one machine can detect multiple products and is compatible with different product sizes.
Strong compatibility:one machine can detect multiple products and is compatible with different product sizes. Quickly interchangeable clips:short loading time and can quickly switch products
Quickly interchangeable clips:short loading time and can quickly switch products Stable operation:runs 5k inspections per day without mechanical faults
Stable operation:runs 5k inspections per day without mechanical faults Fast speed: uses dual stations,with a cycle time (CT) of 15s/pcs.
Fast speed: uses dual stations,with a cycle time (CT) of 15s/pcs.
Defect Types
Scratches, knife marks, pressure marks, white spots, bright marks, bright spots, black lines, over-polishing, polishing marks, discoloration, oxidation, frayed edgesMinimum defect resolution
0.01mmDetection Speed
15s/PCSApplicable Products
Notebook shell, Pad shell inspectionDetection Method
OnlineCamera
8K line scan cameraDetection System
DN software platform
Application Case
Laptop Appearance Inspection Device
A surface defect non-destructive inspection software has been developed for the manual inspection of notebook surface quality in the electronics industry. Initially, the surface of the notebook shell is roughly positioned by the fixture mechanism. Through the feedback of motor A and B phase encoding, hard triggering of an 8K line scan camera and a high-frequency light source controller are used to achieve time-division strobing. The complete image obtained is divided into multiple equal-sized pictures according to the customer's indicated point position map. Using the JSON+HTTP protocol, the algorithm server is requested to obtain the inference result of a single image. Finally, the product surface defect types are obtained through sample-level result queries.
Application case for the product: Notebook component production line.
Consultation Contact Us
-
Phone
0512-66957689
-
Address
No. 11 Tingxin Street, Industrial Park, Suzhou
-
Email
info@dinnar.com


Suzhou Dinnar Automation Technology Company All rights reserved | 苏公网安备32059002003195号
苏公网安备32059002003195号
苏公网安备32059002003195号